MANUAL DE GESTIÓN DE CONTENEDORES

1. INTRODUCIÓN.
Poseidón dispone de un módulo, el cual puede ser embarcado, tanto en una Transtainer, como en una Reach Stacker, cuya misión es que los usuarios validen operaciones en tiempo real, en la campa de la terminal. Este tendrá dos modos de funcionamiento, en función del grado de integración entre la grúa y el módulo:
-
Modo automático.
En este modo, la integración entre el módulo de grúas del Poseidón y la máquina es alta. Por ello, además del software, estará compuesto de una serie de añadidos hardware, cuyo objetivo es que el software de la grúa sea capaz de conocer el estado de la máquina en tiempo real en lo que a operativa respecta. Veamos en que consiste este estado y que periféricos los garantiza:
-
Posición: el módulo conoce en cada momento en que posición de la campa se sitúa la grúa, así como su carro en el caso de las Transtainers. Para ello el sistema contará con un DGPS embarcado que se comunicará directamente con el SW de Poseidón, de manera que este último sea capaz de convertir coordenadas geográficas (latitud, longitud) en posiciones de la campa.
-
Estado del spreader: el módulo conoce el estado de los twist locks del spreader en cada momento y es capaz de bloquearlos / desbloquearlos según sea necesario. Para ello, el software dialogará a través de un PLC o controladora con la grúa para poder conocer si los pines están abiertos, apoyados, cerrados o si los mismos están bloqueados o lo contrario.
-
Presencia de camión: el software es capaz de determinar si, próximo a la máquina se sitúa un camión, identificarlo, y relacionarlo con alguna operación pendiente. Para ello vamos a utilizar la tecnología RFID. Cada camión dispondrá de un TAG que emitirá una señal de radio frecuencia única que lo identificará de forma unívoca. La grúa dispondrá de un lector RFID que dialogará con el software a través de un PLC o controladora.
Lo que se pretende es que la interacción del usuario y el módulo sea mínima, de manera que todas las decisiones sean tomadas por el TOS y por tanto, se mantenga una correspondencia entre las posiciones reales de los contenedores y sus posiciones virtuales en el TOS.
-
-
Modo manual.
En este modo de trabajo, el módulo no interacciona para nada con la grúa, de manera que quien decide siempre es el usuario, por ello, la interacción del mismo con el módulo es muy alta y prácticamente inexistente con la grúa propiamente dicha. Este el módulo sólo se compone del software.
2. DESCRIPCIÓN DEL MÓDULO.
Vamos a pasar a describir de forma exhaustiva el comportamiento del módulo de grúa del TOS Poseidón. Este es el aspecto general de la pantalla principal del software de la grúa para una Transtainer.
Y esta es la pantalla principal para una ReachStacker.

El usuario puede consultar el nombre de la grúa para el cual el módulo trabaja en la parte superior izquierda de la pantalla:

Tanto en la pantalla propia de una Transtainer como en la de la Reach Stacker, el usuario podrá mostrar las órdenes pendientes para la máquina según el tipo de operativa:

-
TERRESTRES: órdenes de contenedores debido a la actividad de la puerta, así como movimientos de remoción de contenedores. Para mostrarlos hemos de usar el botón TER.
-
DESCARGA: órdenes de contenedores como consecuencia de la descarga de un buque. Se muestran con el botón DES.
-
CARGA: órdenes de contenedores de las pilas, así como posibles remociones como consecuencia de la carga de un buque. Se muestran con el botón CRG.
En el centro de la pantalla dispondremos de una rejilla donde podremos consultar las diversas órdenes que la grúa tiene pendiente de realizar, vamos a describirla:

-
NRO.: Número de orden a realizar. Cada vez que se refresca la grúa, el sistema calculará las órdenes disponibles para la misma. Las ordenará y mostrará el número determinado en el maestro de grúas. Más adelante definiremos los criterios de ordenación en función del tipo de operativa. La casilla se iluminará de amarillo si la orden está seleccionada.
-
OPER.: Tipo de operación a realizar. Podemos definir tres tipos de operaciones básicas: E (Entrada), S (Salida) y P (Pila a Pila).
-
CONTENEDOR: El contenedor sobre el cual realizamos la operación.
-
CLASE: Clase del contenedor, si es un 20 pies (1 TEU) o un 40 pies (2 TEUS).
-
EST.: Estado del contenedor, si esta L (Lleno) o V (Vacío).
-
PESO: Peso en toneladas del contenedor registrado en el TOS.
-
REMOS.: Número de contenedores situados por encima del contenedor de la operación en la andana.
-
TIEMPO: Tiempo transcurrido desde la generación de la orden. Se iluminará de colores en función del valor que tenga y su permanencia dentro de los límites definidos en la pantalla de configuración:
-
VERDE: Tiempo inferior a 'Tiempo Límite Inferior' definido en la pantalla de configuración del TOS.
-
NARANJA: Tiempo superior a 'Tiempo Límite Inferior' pero inferior a 'Tiempo Límite Superior', definidos ambos en la pantalla de configuración del TOS.
-
ROJO: Tiempo superior a 'Tiempo Límite Superior' definido en la pantalla de configuración del TOS.
-
-
CALLE / ORIGEN: Posición de origen del contenedor, puede ser un slot de una Pila en cuyo caso daremos la Calle, Pila, Andana y Altura o bien el TAG de un camión en cuyo caso será un número precedido por una C.
-
CALLE / DESTINO: Lo mismo que el campo anterior pero aplicable a la posición de destino.
-
LADO: Exclusivo de la Reach Stacker. Indica el lado por el que el gruista ha de atacar la pila para realizar la orden.
-
T: Lado Tierra.
-
M: Lado Mar.
-
Las órdenes serán mostradas en la rejilla en función de la operativa y una serie de condiciones que han de cumplir, además serán ordenadas según el siguiente criterio:
-
TERRESTRES:
Para que una orden sea tratada por la grúa, ésta ha de cumplir las siguientes condiciones a grandes rasgos:
-
Orden no asignada a otra grúa.
-
La orden asignada a la grúa no está a tres pilas de la orden de la grúa que está en la misma calle, en el caso de una Transtainer o de una pila en la misma calle en el caso de una Reach Stacker.
-
No hay orden asignada a otra grúa entre la orden y la grúa propia con una distancia de +3 o –3 en el caso de la Transtainer.
-
La orden en el rango de trabajo definido para la grúa.
-
Si para un mismo tag hay una entrada y salida terrestre, no se puede hacer la salida si todavía existe la entrada.
-
Si para un mismo tag hay una entrada y salida de pila, no se puede hacer la entrada si todavía existe la salida.
Los criterios por los cuales se ordenan las órdenes de una grúa en el modo terrestre son, según prioridad, los siguientes:
-
Órdenes Forzadas. (Motivo: permite al controlador de la campa forzar la realización de una determinada orden de prioridad baja)
-
Órdenes cuya distancia de la grúa sea 0, en la misma pila. (Motivo: evitar movimientos excesivos de las máquinas).
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Operación Grúa', que estén en la calle de la grúa, ordenadas por distancia a la grúa en pilas.
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Superior', que estén en la calle de la grúa, ordenadas por distancia a la grúa en pilas.
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Inferior', que estén en la calle de la grúa, ordenadas por distancia a la grúa en pilas.
-
Órdenes cuyo tiempo sea inferior al 'Tiempo Límite Inferior', que estén en la calle de la grúa, ordenadas por distancia a la grúa en pilas.
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Operación Grúa', que no estén en la calle de la grúa.
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Superior', que no estén en la calle de la grúa.
-
Órdenes cuyo tiempo exceda el 'Tiempo Límite Inferior', que no estén en la calle de la grúa.
-
Órdenes cuyo tiempo sea inferior al 'Tiempo Límite Inferior', que no estén en la calle de la grúa.
-
Salidas: aquellas con menos remociones primero (Motivo: con esto evitas muchos movimientos innecesarios).
-
Por tiempo de espera a nivel de minutos.
-
Por número de remociones a realizar de manera ascendente.
-
Para PILA – PILA por tiempo de realización a nivel de milisegundos, para hacerlas en el orden en que han sido generadas. (Motivo: esto permite, si el usuario generó órdenes P-P de una manera secuenciada en una pila que se respete ese orden por parte de la grúa)
-
-
DESCARGA:
Para que una orden sea tratada por la grúa esta ha de cumplir las siguientes condiciones a grandes rasgos:
-
La orden asignada a la grúa no está a tres pilas de la orden de la grúa que está en la misma calle en el caso de una Transtainer.
-
La orden está en el rango de trabajo de la grúa para la descarga.
Los criterios por los cuales se ordenan las órdenes de una grúa en el modo descarga son, según prioridad, los siguientes:
-
Órdenes que sobrepasen el 'Tiempo Límite Operación Grúa' (configuración del Poseidón). (por tpo. de espera a nivel de minutos) (Motivo: forzar a hacer las órdenes más antiguas que pasen un límite de tiempo, debido a que no se han atendido puesto que la grúa atendió otras por proximidad).
-
Por tiempo de espera a nivel de minutos.
-
Por distancia (pilas). (Motivo: evitar movimientos excesivos de las máquinas).
-
-
CARGA:
Para que una orden sea tratada por la grúa esta ha de cumplir la siguiente condición:
-
La orden ha sido asignada a la grúa para la mano y la carpeta de la operativa.
-
La grúa tiene rango de trabajo que incluye la posición de la orden para la mano y la carpeta de la operativa.
Los criterios por los cuales se ordenan las órdenes de una grúa en el modo descarga son, según prioridad, los siguientes:
-
Orden de envío a la grúa en la secuencia estrictamente.
-
A continuación, en la pantalla principal de la grúa podremos observar los controles que nos permiten conocer la posición de la grúa en la campa.
En la parte superior mostraremos las andanas de las que se constituye la pila, en la orientación definida en el TOS, así como la andana de camión (dibujo de camión sobre la misma). En modo automático, la posición de la andana estará iluminada de rojo. En la parte inferior mostraremos la calle y la pila donde se ubica la grúa.
En el caso de la Reach Stacker la posición donde se ubica la mostraremos de la siguiente manera:

Vemos que indicaremos, además de la calle y la pila, la andana donde se sitúa la grúa.
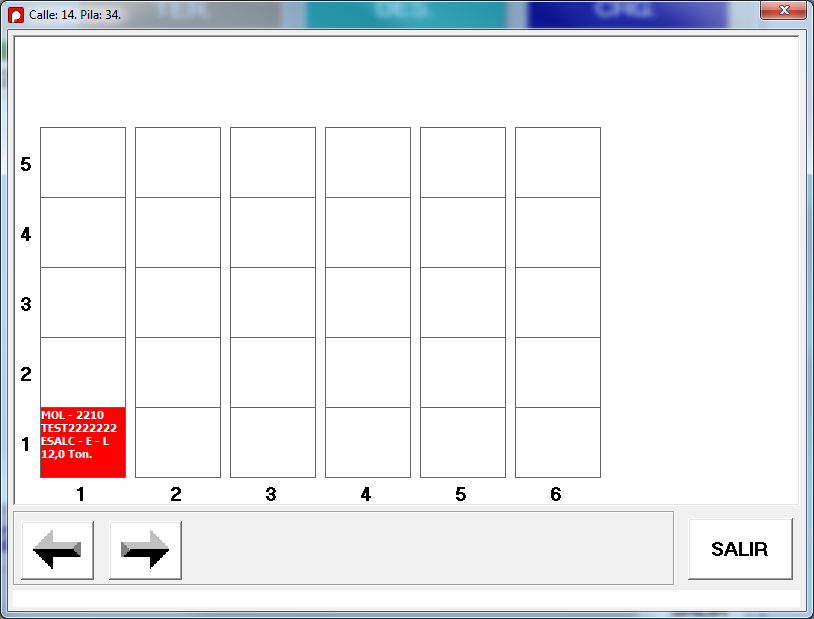
Podremos consultar la pila en la cual nos situamos mediante el siguiente botón.

El resultado es el siguiente formulario donde se puede consultar la pila.
La forma de conocer si la grúa tiene los pines bloqueados o no es mediante la aparición del siguiente icono en la pantalla.

Sabremos si la grúa a leído o no un TAG de un camión mediante el siguiente control. Así si el TAG no ha sido leído o ha sido rechazado por la grúa.

En el caso de que el TAG haya sido aceptado, en la pantalla se mostrará lo siguiente, donde el número mostrado es el del TAG.
El TAG se aceptará en función de una serie de requerimientos dados por el modo de trabajo, el tipo de orden y el tipo de operación. Más adelante profundizaremos en este aspecto.
Por último, la pantalla principal dispone de los siguientes botones, así de izquierda a derecha.

-
Botón de marcado: sirve para marcar la orden a realizar por la grúa. Para este botón es necesario su uso si la grúa trabaja en modo manual. cuando una orden está marcada queda sombreada en azul.

-
Botón de validación: una vez marcada la orden, sirve para desencadenar el proceso de validación.
-
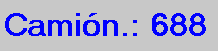
Botón actividades de la grúa por rango: sirve para consultar todas las órdenes pendientes para la grúa susceptibles de poder ser hechas por encontrarse en el rango de trabajo. Se calculará en función del modo de trabajo de la grúa.
3. OPERATIVA CON TRANSTAINER EN AUTOMÁTICO.
En este capítulo, vamos a describir cual es el flujo cuando el módulo de la grúa funciona en modo automático para la grúa transtainer.
3.1. OPERACIÓN DE ENTRADA.
La operación consiste en estibar un contenedor desde un camión a una posición en la pila. Veamos sus características.
-
LECTURA DEL TAG: Para que el TAG sea reconocido, ha de existir una orden para la grúa con el TAG asignado y la grúa ha de estar en la posición de la orden.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de estar situada en la posición donde se ha de dejar el contenedor de la entrada y ha de ser leído el TAG de la operación.
-
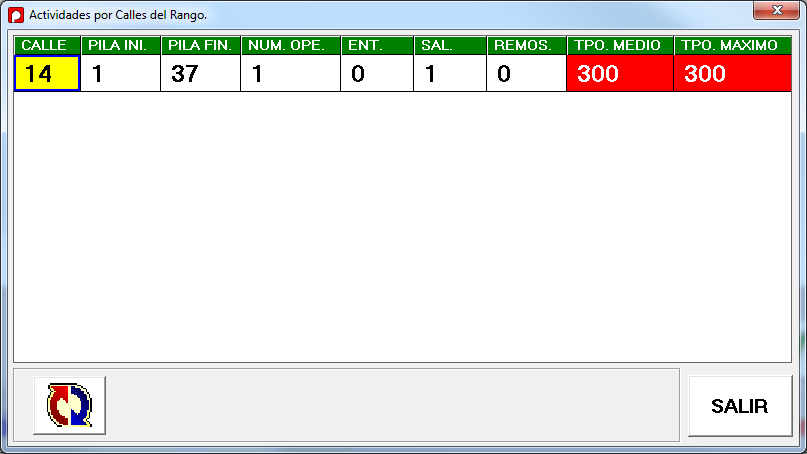
FLUJO DE LA OPERACIÓN: Veamos la pantalla del software de la grúa.
Sobre la representación de las andanas aparece la operación actual que va a realizar la grúa (1), así como una etiqueta en verde con el texto 'O - 1' (2) donde O representa el origen de la operación y el 1 la altura donde se sitúa el contenedor. La etiqueta en amarillo D - 1, representa la andana donde el contenedor ha de ser depositado (3), así como la altura donde hemos de depositarlo. Cuando el carro de la grúa pasa por estas andanas el bloqueo de pines desaparece (4) y el gruista puede en estas posiciones cerrar y abrir pines. Cuando el gruista pasa por una andana no origen o destino (5), los pines quedan bloqueados (4) y no puede ni abrir ni cerrar pines.
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Si desde la oficina se desbloquean pines (maestro de grúas) y el gruista deja el contenedor en una posición diferente a la que informáticamente se le asignó, la operación no se validará, sólo se hará si se deja el contenedor en el destino asignado. Si se quiere evitar esto, el TOS proporciona la utilidad 'Reubicar' en la pantalla 'Validación de Operaciones en Curso' que podremos utilizar una vez desmarcada la orden.
-
CANCELACION DE LA ORDEN: Para poder cancelar la orden, el contenedor no ha de estar agarrado, basta con que el usuario pulse el botón de cancelación (6) y abandone la zona. Desde la oficina, utilizando el TOS, un operario ha de cancelar la orden desde la pantalla de 'Validación de Operaciones en Curso'.
3.2. OPERACIÓN DE SALIDA.
La operación consiste en estibar un contenedor desde una pila a una plataforma de un camión. Durante el proceso es posible que previamente haya que remocionar contenedores situados encima del contenedor a sacar para facilitar la operación.
-
LECTURA DEL TAG: Para que el TAG sea reconocido, ha de existir una orden para la grúa con el TAG asignado y la grúa ha de estar en la posición de la orden.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de situarse en la posición de la operación de salida a realizar. No es necesario, al contrario que en la entrada, la lectura del TAG.
-
FLUJO DE LA OPERACIÓN: Veamos la pantalla de la Grúa.
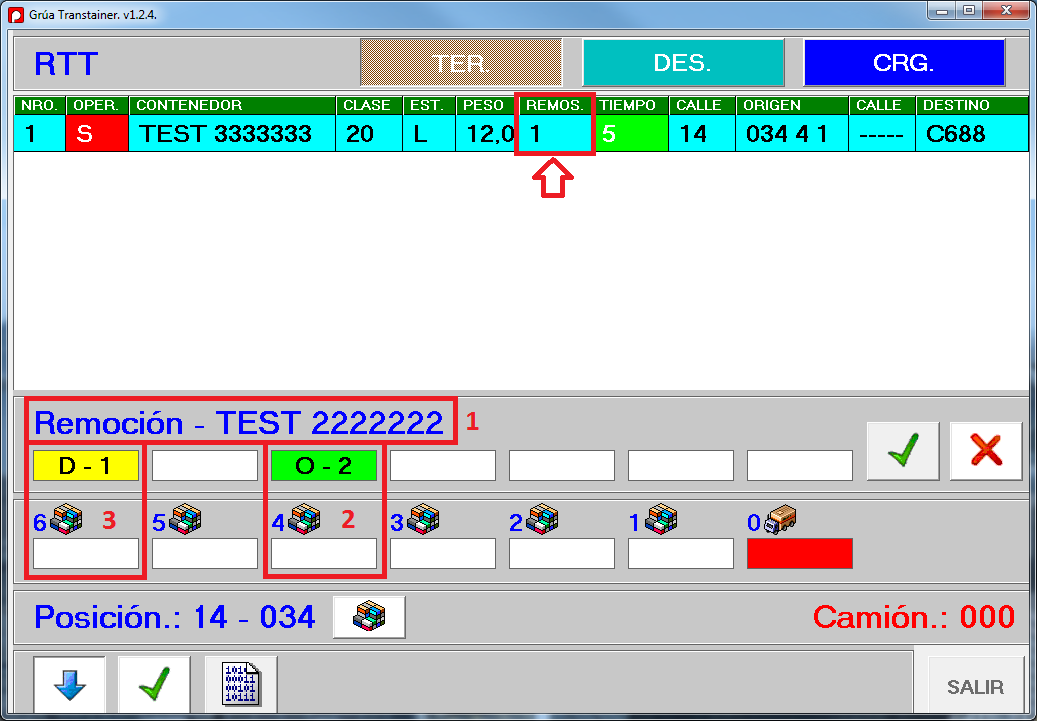
Como vemos en la pantalla, para esta operación tenemos una remoción previa a la salida del contenedor de la pila. Ésta será mostrada al usuario de la grúa (1) indicando el contenedor a mover que está sobre el contenedor que pretendemos sacar. A continuación, el usuario ha de dirigir el carro a la andana iluminada de verde, con el texto O - 2 que indica que es el origen del movimiento y que el contenedor a agarrar está a dos de altura. Una vez agarrado el contenedor en la andana origen del movimiento, el usuario ha de dirigirse a la andana destino, iluminada de amarillo y con el texto D - 1 de destino y dejar el contenedor a altura 1. Una vez soltado el contenedor la remoción quedaría realizada.
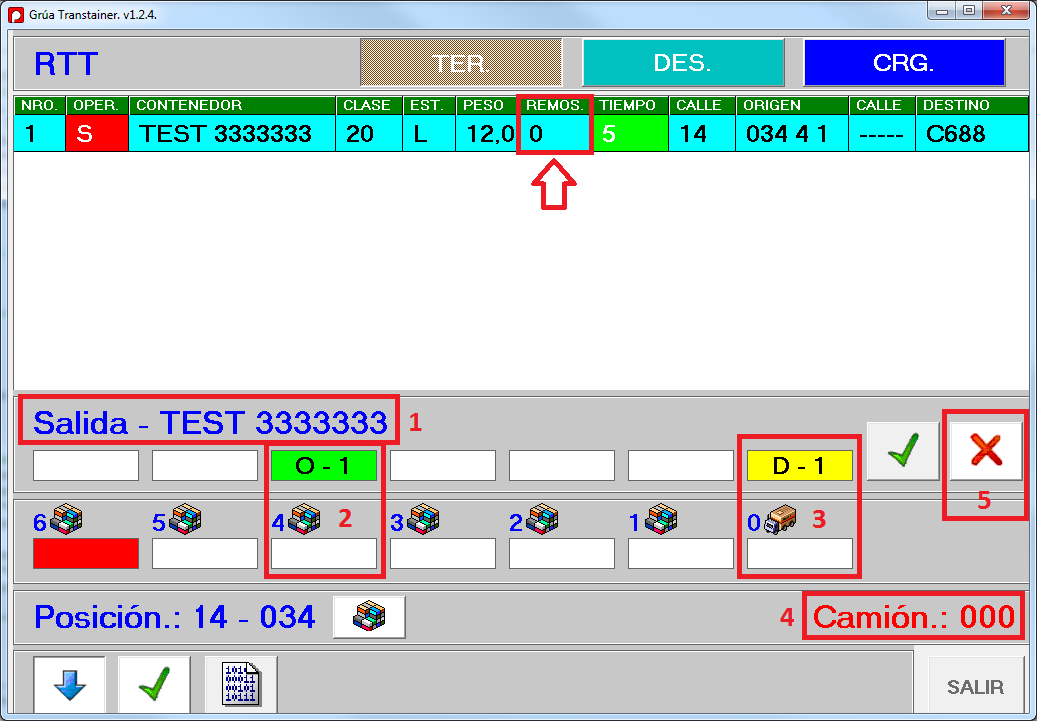
La grúa marca que tenemos que realizar una salida de un contenedor (1). El usuario puede consultar la andana origen (2), nuevamente iluminada en verde, con el texto O - 1 indicando origen y altura una. Una vez agarrado el contenedor, el usuario ha de dirigirse a la andana camión, iluminada de amarillo y con texto D - 1 (destino, altura uno) (3). Durante el proceso, se puede producir la lectura del TAG del camión (4) en cualquier momento, es condición obligatoria que ésta se produzca para que la grúa pueda soltar el contenedor en la andana destino en el caso de la salida.
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Si desde la oficina se desbloquean pines (maestro de grúas) y el gruista deja el contenedor en una posición diferente a la que informáticamente se le asignó, la operación no se validará, sólo se hará si se deja el contenedor en el destino asignado. Esto se aplica tanto a las remociones previas como a la salida.
-
CANCELACION DE LA ORDEN: Para cancelar la orden de la grúa, ésta no ha de acarrear ningún contenedor. En el caso de que así fuera, el usuario puede devolverlo a la posición inicial desde donde lo agarró (todas las operaciones previas quedarían realizadas). La forma de operar, para cancelar la orden ha de ser en primer lugar, desde el TOS borrarla desde la pantalla 'Validación de Operaciones en Curso'. Una vez hecho esto, el usuario tiene dos opciones, la primera es mover la grúa y la segunda es utilizar el botón 5. Si el usuario lo único que desea es desactivar la orden, pero no borrarla, lo que ha de hacer es mover la grúa, para que la operación se desmarque.
3.3. OPERACIÓN PILA A PILA.
La operación consiste en estibar un contenedor desde una andana de una pila a otra andana de la misma pila. Para esta operación no es necesario el uso de un camión (TAG).
-
LECTURA DEL TAG: No es necesaria la lectura de un TAG para realizar el proceso.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de situarse en la posición de la operación de pila a pila a realizar, es decir en la calle y en la pila de la operación.
-
FLUJO DE LA OPERACIÓN: Veamos la pantalla de la Grúa.
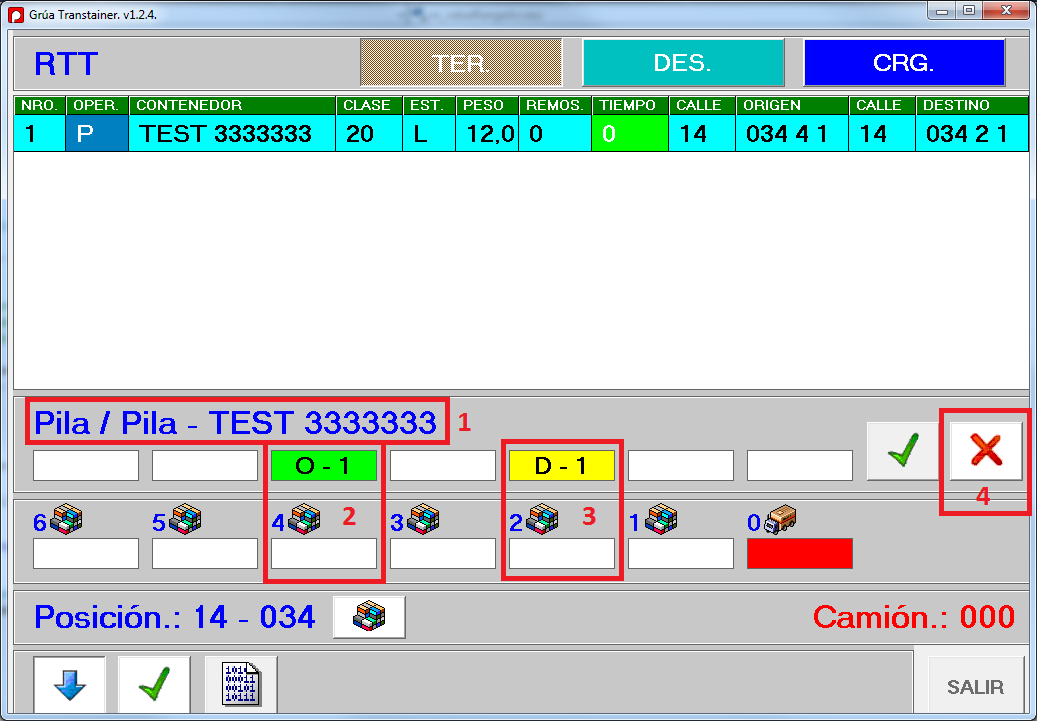
La pantalla nos muestra que hemos de realizar una Pila-Pila sobre un contenedor (1). Previamente a este proceso, si el contenedor a mover, tuviera remociones, se desencadenaría el proceso correspondiente como vimos en el capítulo anterior. En este caso, el usuario ha de dirigirse a la andana origen (2) (iluminada en verde con texto O - 1), coger el contenedor a primera altura y dirigirse a la andana destino (3) (iluminada de amarillo con texto D - 1) y dejar el contenedor a altura uno y con esto el proceso quedaría realizado.
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Si desde la oficina se desbloquean pines (maestro de grúas) y el gruista deja el contenedor en una posición diferente a la que informáticamente se le asignó, la operación no se validará, sólo se hará si se deja el contenedor en el destino asignado. Esto se aplica tanto a las remociones previas como a la Pila-Pila.
-
CANCELACION DE LA ORDEN: Para cancelar la orden de la grúa, ésta no ha de acarrear ningún contenedor. En el caso de que así fuera, el usuario puede devolverlo a la posición inicial desde donde lo agarró (todas las operaciones previas quedarían realizadas). La forma de operar, para cancelar la orden ha de ser en primer lugar, desde el TOS borrarla desde la pantalla 'Validación de Operaciones en Curso'. Una vez hecho esto, el usuario tiene dos opciones, la primera es mover la grúa y la segunda es utilizar el botón 4. Si el usuario lo único que desea es desactivar la orden, pero no borrarla, lo que ha de hacer es mover la grúa, para que la operación se desmarque.
4. OPERATIVA CON REACH STACKER EN AUTOMÁTICO.
En este capítulo, vamos a describir cual es el flujo cuando el módulo de la grúa funciona en modo automático para la grúa reach stacker.
4.1. OPERACIÓN DE ENTRADA.
Como ya hemos visto antes, la operación consiste en estibar un contenedor desde un camión a una posición en la pila. Veamos sus características.
-
LECTURA DEL TAG: Para que el TAG sea reconocido, ha de existir una orden para la grúa con el TAG asignado.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de cumplir dos condiciones:
-
La grúa ha de leer el TAG de la operación.
-
La grúa ha de estar situada en:
-
en la calle y la pila de la operación.
-
en cualquiera de los pasillos adyacentes a la posición con la misma pila.
-
en la calle y la pila siguiente o anterior a la de la operación.
-
en cualquiera de los pasillos adyacentes a la posición en la pila siguiente o previa a la de la operación.
-
-
-
FLUJO DE LA OPERACIÓN: Veamos la pantalla de la Grúa.
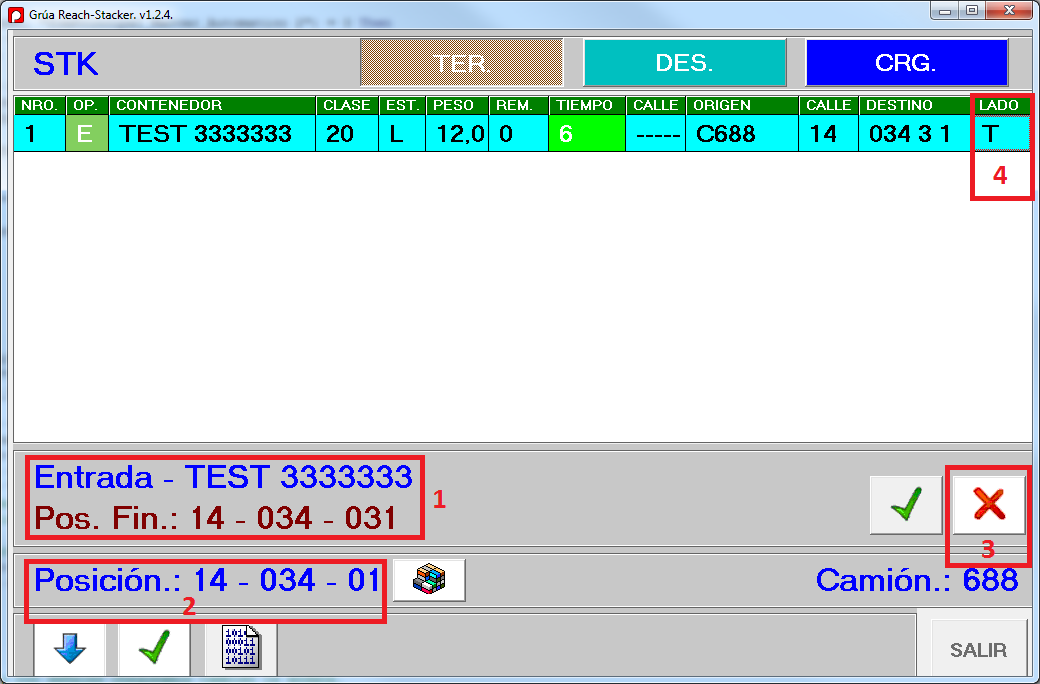
Una vez activada la grúa, la pantalla nos muestra el tipo de operación a realizar y la posición final de la misma (1). Lo primero será agarrar el contenedor del camión. A continuación, nos dirigiremos a la posición final de la entrada, consultando la posición actual (2) para dejar el contenedor. El usuario, siempre según el estado de la pila informática, recibe como sugerencia realizar la operación por un lado de la pila (4).
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Si los pines de la grúa están desbloqueados, el gruista puede dejar el contenedor en la posición que él estime, siempre que sea posible. El sistema, para evitar incongruencias, bloqueará los pines o no en función de si la posición por la que navega la grúa es conveniente para el contenedor o no cuando la grúa lo tiene agarrado. Para que se produzca este comportamiento ha de estar activado en el INI de la grúa el valor PosicionFlex a 1.
-
CANCELACION DE LA ORDEN: Para poder cancelar la orden, el contenedor no ha de estar agarrado, basta con que el usuario pulse el botón de cancelación (6) y abandone la zona. Desde la oficina, utilizando el TOS, un operario ha de cancelar la orden desde la pantalla de 'Validación de Operaciones en Curso'.
4.2. OPERACIÓN DE SALIDA.
Como ya hemos visto antes, la operación consiste en estibar un contenedor desde una pila a una plataforma de un camión. Durante el proceso es posible que previamente haya que remocionar contenedores situados encima o a los lados del contenedor a sacar para facilitar la operación.
-
LECTURA DEL TAG: Para que el TAG sea reconocido, ha de existir una orden para la grúa con el TAG asignado.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de estar situada en:
-
La calle y la pila de la orden a realizar.
-
Cualquiera de los pasillos adyacentes a la calle de la orden a realizar en la misma pila que la de la operación.
-
-
FLUJO DE LA OPERACIÓN: Veamos la pantalla de la Grúa.
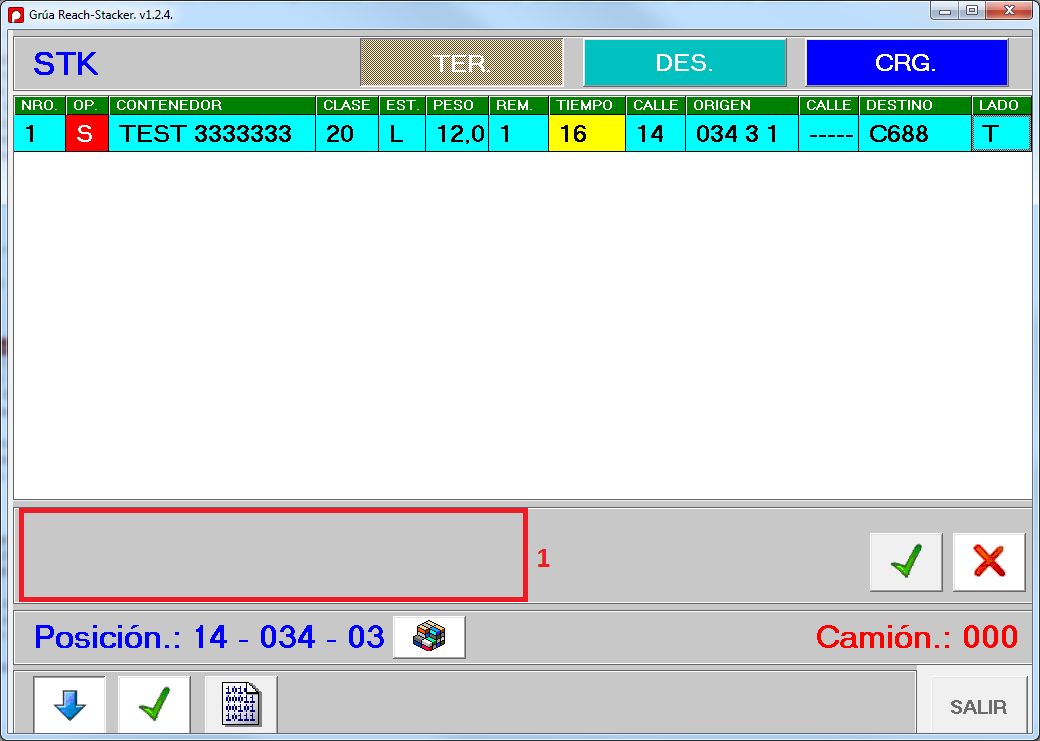
Tras la activación de la grúa, el usuario ha de dirigirse a la posición de la salida para acarrear un contenedor. En primer lugar el sistema desconoce que contenedor va a ser acarreado, por lo tanto el área de información permanece vacía.
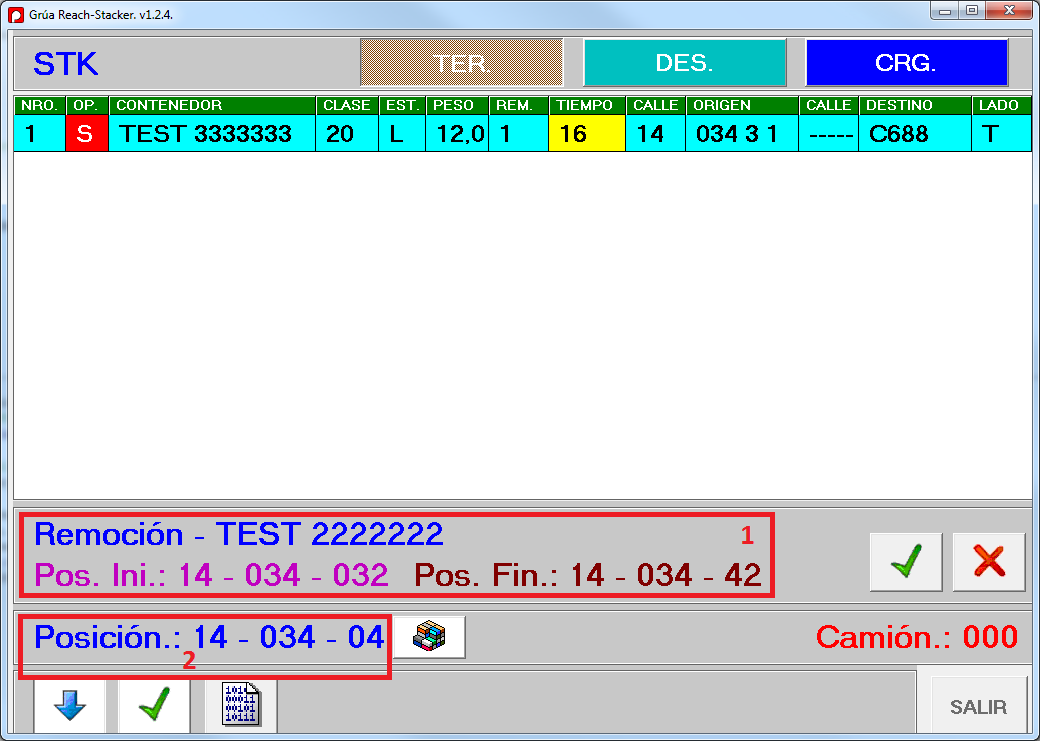
Una vez acarreado un contenedor, podremos comprobar el tipo de operación a realizar (1). En esta fase, el usuario tendrá los pines desbloqueados y podrá dejar el contenedor en cualquier posición, siempre que la misma sea correcta. Una vez, depositado el contenedor en el suelo, deberá de nuevo aproximarse a la posición de la salida y coger otro contenedor, en este caso ya la salida propiamente dicha ...
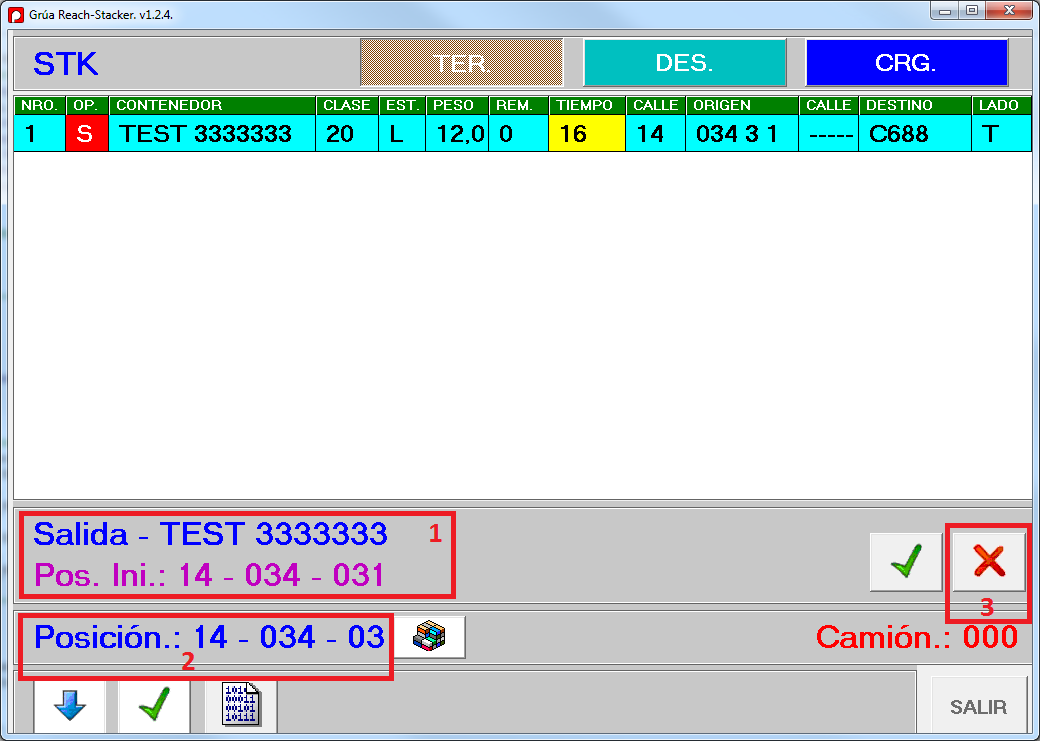
El software de la grúa nos muestra la información necesaria para la operación salida (1) una vez agarrado el contenedor. En el panel 2 el usuario puede comprobar la posición actual de la grúa. Cuando la misma se mueva de la posición inicial del contenedor a salir, los pines permanecerán desbloqueados para que se pueda depositar el contenedor sobre el camión. Para poder realizar esta última operación, el TAG ha tenido que ser leído.
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Con los pines desbloqueados, el usuario va a poder acarrear cualquier contenedor situado en la pila de la operación y remocionarlo como si el contendor estuviera encima del contenedor a sacar en el caso de que los pines estén bloqueados. En lo que al resto de la operativa respecta, no aporta nada más.
-
CANCELACION DE LA ORDEN: Para cancelar la orden de la grúa, ésta no ha de acarrear ningún contenedor. En el caso de que así fuera, el usuario puede devolverlo a la posición inicial desde donde lo agarró (todas las operaciones previas quedarían realizadas). La forma de operar, para cancelar la orden ha de ser en primer lugar, desde el TOS borrarla desde la pantalla 'Validación de Operaciones en Curso'. Una vez hecho esto, el usuario tiene dos opciones, la primera es mover la grúa y la segunda es utilizar el botón 3. Si el usuario lo único que desea es desactivar la orden, pero no borrarla, lo que ha de hacer es mover la grúa, para que la operación se desmarque.
4.3. OPERACIÓN PILA A PILA.
Como ya vimos previamente, la operación consiste en estibar un contenedor desde una andana de una pila a otra andana de la misma pila. Para esta operación no es necesario el uso de un camión (TAG).
-
LECTURA DEL TAG: No es necesaria la lectura de un TAG para realizar el proceso.
-
CONDICIONES DE ACTIVACIÓN: Para que la orden se active de forma automática, la grúa ha de situarse en la posición de la operación de pila a pila a realizar, es decir, en la calle, en la pila y en la andana origen de la operación.
-
FLUJO DE LA OPERACIÓN: Veamos la pantalla de la Grúa.
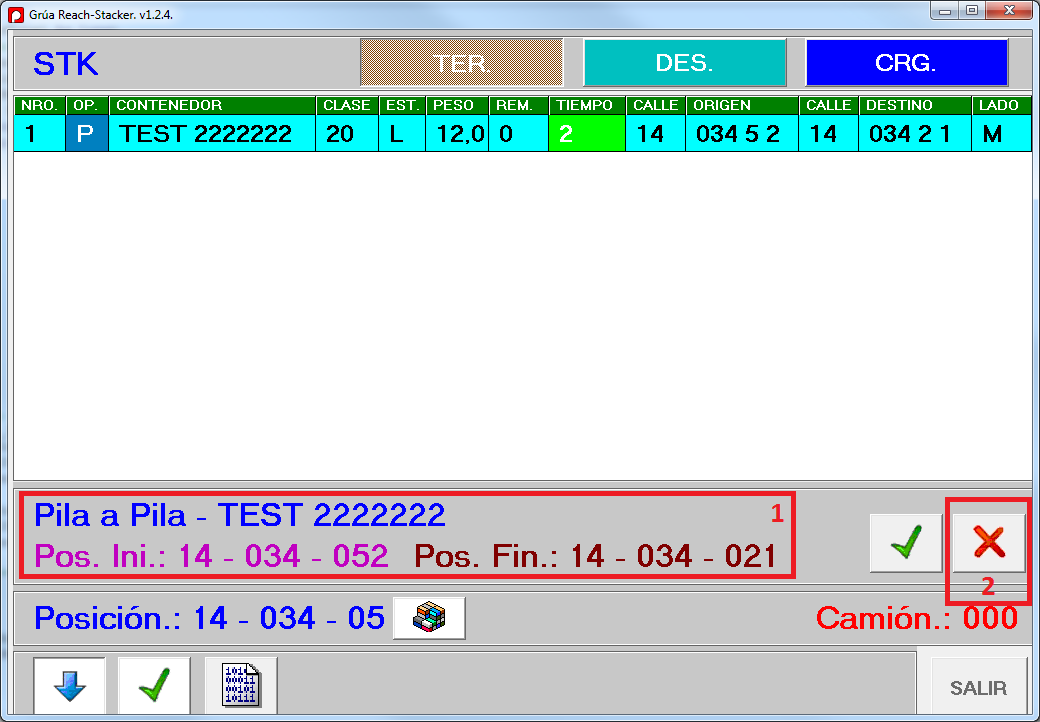
El usuario, una vez activada la operación, podrá agarrar el contenedor de la posición inicial de la Pila-Pila. Si el contenedor no es el esperado, se generará una remoción como hemos visto en el capítulo anterior. Si es el contenedor es el esperado, el usuario ha de dirigirse a la posición final de la operación y soltar en ella el contenedor, con lo que la orden quedaría validada.
-
COMPORTAMIENTO CON PINES DESBLOQUEADOS: Si los pines de la grúa están desbloqueados, el gruista puede dejar el contenedor en la posición que él estime si es posible. El sistema, para evitar incongruencias, bloqueará los pines o no, en función de si la posición por la que navega la grúa es conveniente para el contenedor o no cuando acarrea el contenedor. Para que se produzca este comportamiento ha de estar activado en el INI de la grúa el valor PosicionFlex a 1.
-
CANCELACION DE LA ORDEN: Para cancelar la orden de la grúa, ésta no ha de acarrear ningún contenedor. En el caso de que así fuera, el usuario puede devolverlo a la posición inicial desde donde lo agarró (todas las operaciones previas quedarían realizadas). La forma de operar, para cancelar la orden ha de ser en primer lugar, desde el TOS borrarla desde la pantalla 'Validación de Operaciones en Curso'. Una vez hecho esto, el usuario tiene dos opciones, la primera es mover la grúa y la segunda es utilizar el botón 2. Si el usuario lo único que desea es desactivar la orden, pero no borrarla, lo que ha de hacer es mover la grúa, para que la operación se desmarque.
5. OPERATIVA CON TRANSTAINER MANUAL.
En este capítulo, vamos a describir cómo manejar el módulo de la grúa en modo manual (sin señales, TAGs y posicionamiento) para la grúa transtainer. El funcionamiento es igual para todos los tipos de operaciones, en esencia se describe de la siguiente manera:
El usuario debe entre las órdenes disponibles, seleccionar una (1). A continuación ha de marcarla (2) y confirmarla (3) o cancelarla (4), si cambia de opinión y decide no hacerla. Con el botón (5) el usuario puede consultar las órdenes pendientes que tiene. Este botón se coloreará de rojo cuando existan órdenes pendientes para un determinado rango teniendo en cuenta el modo de trabajo.
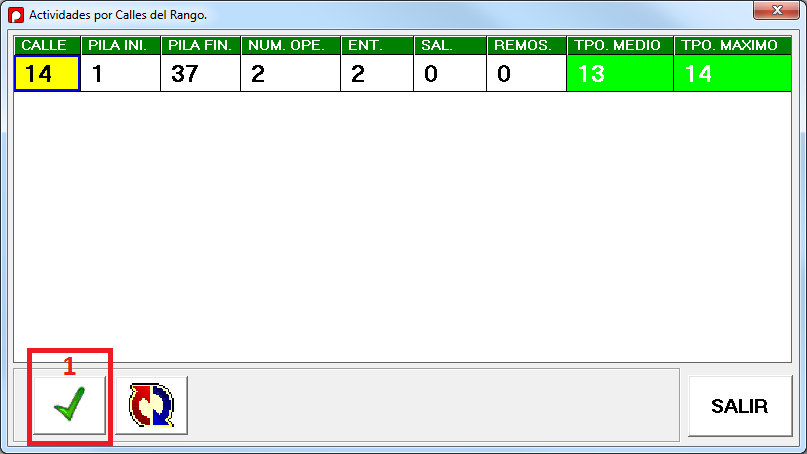
El usuario puede seleccionar un rango y mostrar las operaciones del mismo en la rejilla de la pantalla principal de la aplicación. Para ello ha de usar el botón (1). Queda por hablar de cómo se gestionan las remociones generadas cuando se realiza una salida de la pila y son necesarias. El sistema generará una a una, y como en el modo automático, calculará la posición más conveniente para realizarlas. La forma de tratarlas, por parte del usuario, es exactamente igual que una orden general.
6. OPERATIVA CON REACH STACKER MANUAL.
En este capítulo, vamos a describir cómo manejar el módulo de la grúa en modo manual (sin señales, TAGs y posicionamiento) para la grúa reach stacker. Al contrario que en el capítulo anterior, el funcionamiento varía un poco en función de la operación a realizar así:
-
ENTRADA: La pantalla principal para una entrada es la siguiente:
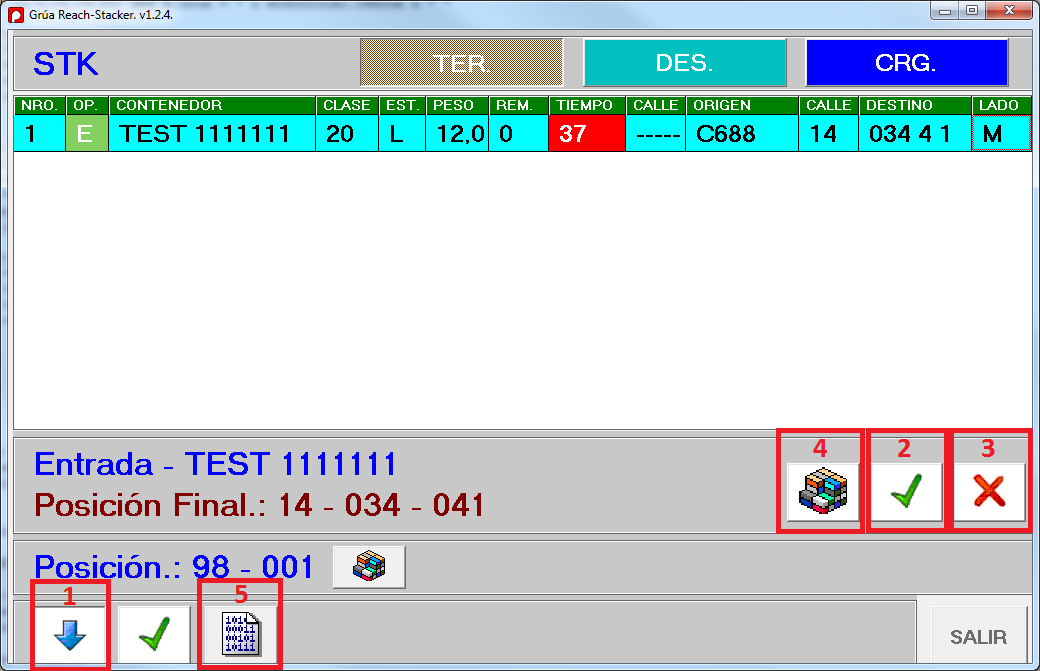
El usuario ha de seleccionar una operación y marcarla (1), a continuación a de confirmarla (2) o cancelarla (3) si decidiera no continuar. Como en la grúa Reach Stacker, el usuario puede consultar las órdenes por rango y traerlas a la rejilla mediante el botón (5). Además, el usuario dispone de una funcionalidad mediante la cual, antes de confirmar la operación de entrada, puede cambiarla de sitio si desea, esto es mediante el botón (4) que nos lleva a la siguiente pantalla:
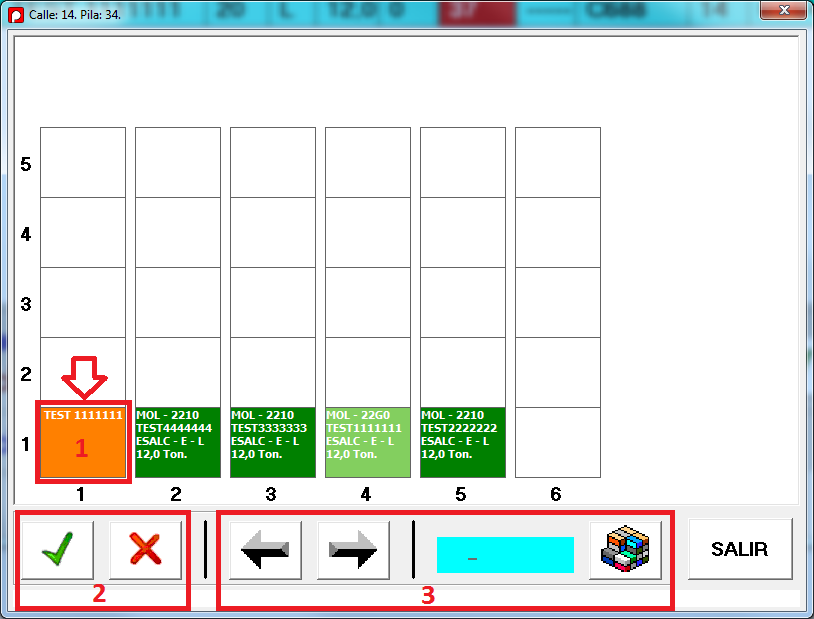
Si el usuario desea cambiar la posición de la entrada ha de clicar en un slot libre (1) y este se coloreará de naranja con el nombre del contenedor de la operación. A continuación sólo hemos de aceptar o cancelar (2). La pila inicial mostrada es la de la operación, si el usuario desea cambiar de pila, puede usar el navegador disponible al efecto (3).
-
SALIDAS Y PILA A PILA: Cuando estamos ante operaciones de este tipo, si disponen de contenedores tanto encima como en los laterales del contenedor de la orden, el sistema al marcarla el usuario (1), mostrará la siguiente pantalla para ir remocionando uno a uno todos los contenedores que pueden molestar, desde el lado de trabajo que indica la grúa (2).
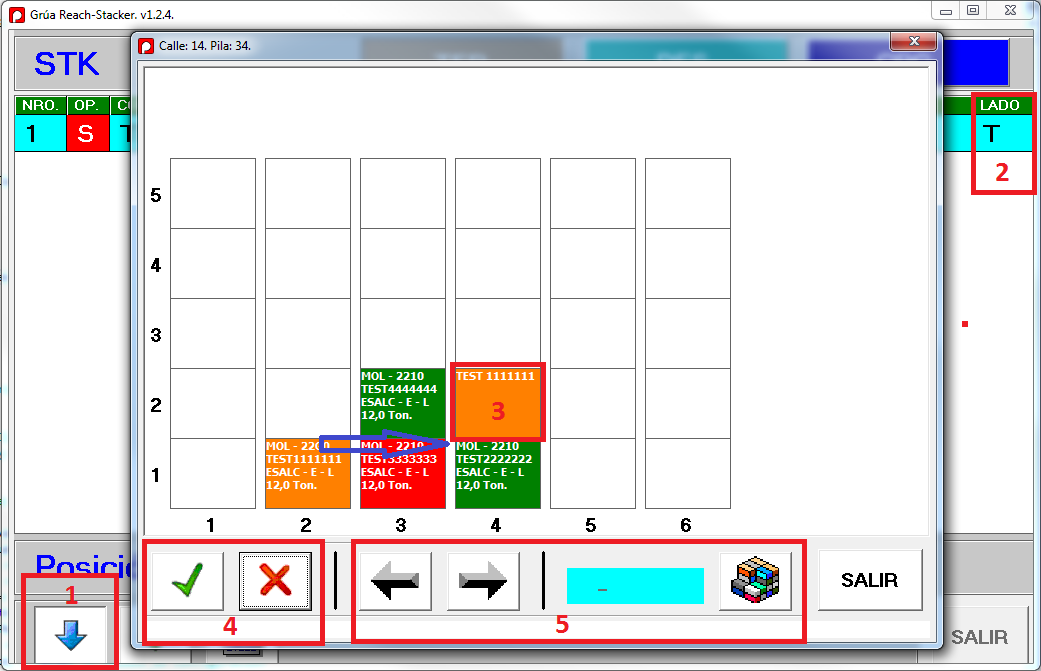
El usuario ha de ir seleccionando contenedor a contenedor una nueva posición haciendo click en un slot vacío (3) y confirmándolo o no (4). Si decide que el contenedor se quede en la posición actual ha de validar el movimiento (4) y si decide moverlo a otra pila diferente a la de la operación, puede usar el navegador (5).

Una vez finalizadas las remociones, el usuario sólo ha de validar la operación o no usando los botones al efecto (1).